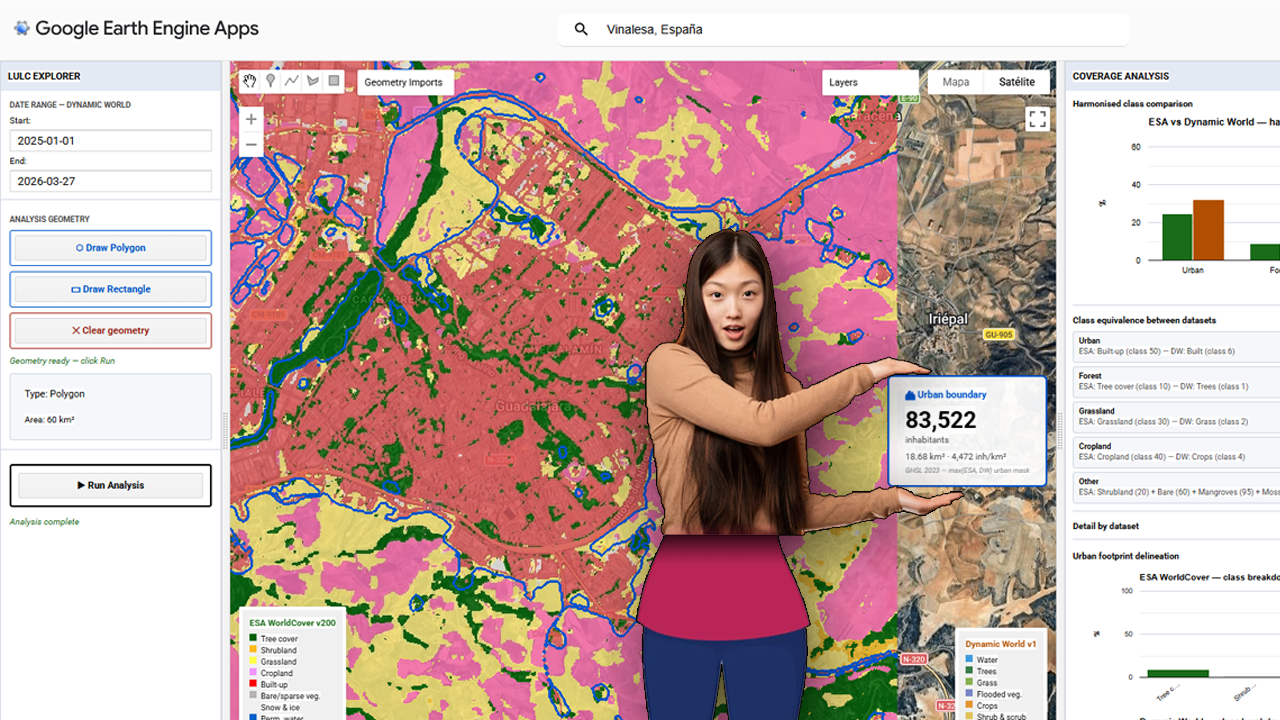
The foundational step of this methodology involves the deployment of a centralized processing interface within the Google Earth Engine (GEE) environment. The provided visualization captures the core interface of the custom GEE application, which serves as the hub for the multi-sensor LULC validation pipeline. Within this dashboard, users can define a specific Area of Interest (AOI)—highlighted here over the Iberian Peninsula and North Africa—and configure key parameters, including temporal ranges for the acquisition of sentinel-derived products. Crucially, the interface is designed to load and compare two primary datasets simultaneously: Dynamic World (near real-time, probability-based LULC) and ESA WorldCover (10m resolution structured LULC). The contrasting classification schemes are represented by the legends on the left and right sides of the map view, which illustrate the varying definitions of ‘Built-up’ and urban areas between the two products. Establishing this visual and statistical comparison at the application level is the prerequisite for calculating the spatial disagreement threshold, or delta, that guides the subsequent merging and population estimation phases.
Category Archives: lidar
Setting up Mapterhorn terrain in RStudio

¿Alguna vez has querido visualizar el relieve de un territorio en 3D directamente desde R, sin depender de software GIS externo? Mapterhorn es un proyecto open source que distribuye modelos digitales de elevación (MDT) de alta resolución — hasta 2 metros en España — empaquetados en formato PMTiles, un estándar moderno que permite servir datos geoespaciales sin necesidad de un servidor propio.
En este post veremos cómo configurar Mapterhorn en R usando el paquete mapgl en Rstudio, que nos permite crear mapas interactivos con terreno 3D en pocas líneas de código. El resultado: visualizaciones como la que ves abajo, con sombreado de relieve (hillshade) generado directamente desde los datos de elevación del IGN.
Aventuras y desventuras de un geógrafo en “desarrollo”
La cartografía siempre ha sido un oficio de precisión, paciencia y criterio espacial. Durante años, el flujo de trabajo de cualquier geógrafo pasaba inevitablemente por entornos de escritorio como ArcGIS Pro o QGIS: cargar capas, ajustar simbología, exportar mapas. Herramientas sólidas, probadas, indispensables. Pero algo está cambiando.
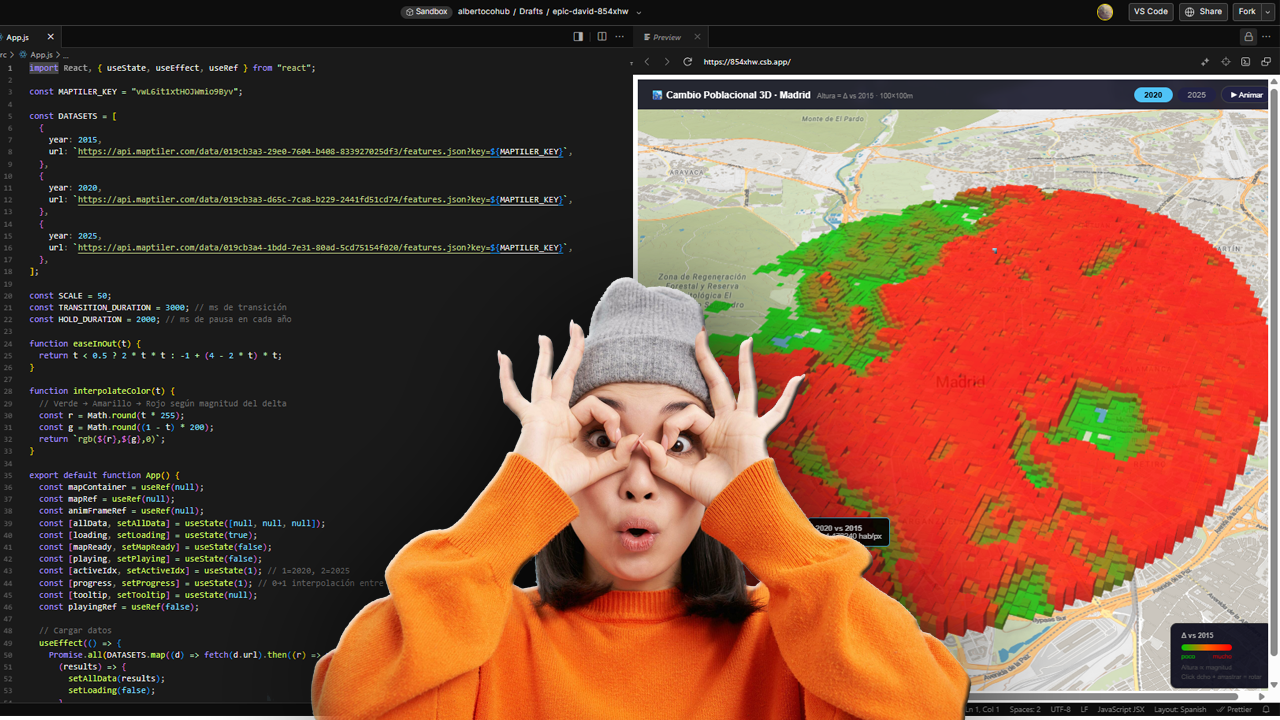
Cada vez más, el análisis espacial ocurre en la nube, en navegadores, en entornos de código. En anteriores post habéis visto algunos test/ideas/aplicaciones que he desarrollado con Javascript Google Earth Engine, que procesa imágenes satelitales a escala planetaria sin mover un solo archivo. Deck.gl y Maplibre renderizan millones de puntos en 3D directamente en el navegador. React convierte un mapa en una aplicación interactiva con pocas líneas de código.
From LIDAR USGS to DSM in a few lines of code. The magic of R
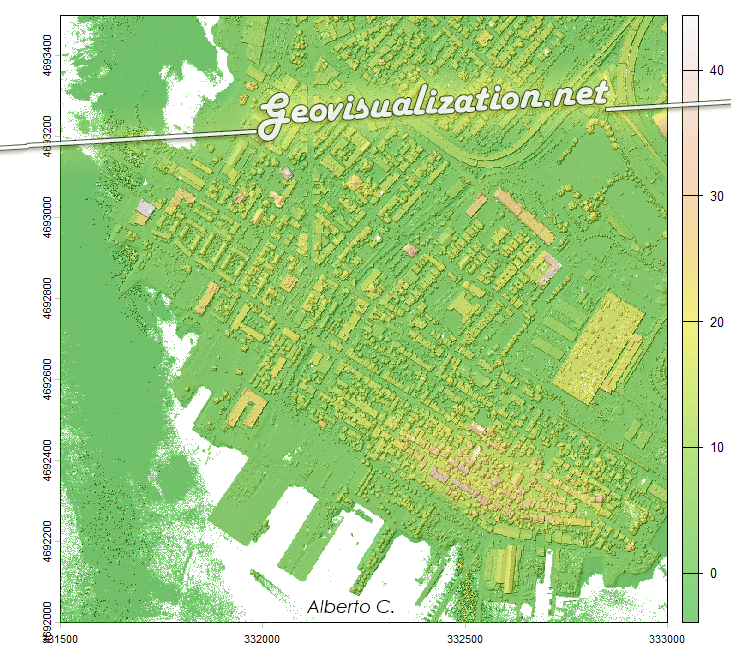
The USGS LiDAR Explorer, hosted via gishub.org, serves as a high-performance web gateway for interacting with the USGS 3D Elevation Program (3DEP) datasets. First thing, go to this GITHUB repository https://github.com/opengeos/maplibre-gl-usgs-lidar, download code for the project (code>download ZIP), get connected with RStudio, save new project and open a script window… It’s all set up!
Testing GEMINI for 3D environments. From SketchUp to an unlikely future!

The exercise shows how a simple SketchUp 3D volume, defined solely by its basic geometry, can be transformed into a complex architectural proposal. Starting from the initial schematic model, the system interprets proportions, levels, and shapes, and converts them into a fully developed building, complete with textures, vegetation, lighting, and an urban context
Precision Elevation Data for Forest Giants: LiDAR vs ETH Global Canopy Height in Mata do Buçaco (Portugal)

High‑resolution elevation data underpins almost every spatial analysis we do in GIS—especially in forests where vertical structure defines habitat, biomass, wind exposure, fire behavior, hydrology, and the microclimates that sustain rare species. In rugged or densely vegetated environments, a coarse or biased elevation model propagates error everywhere: orthorectification drifts, hillshades mislead, slope/aspect misclassify, and canopy metrics saturate. The result is decisions made on blurred terrain that hides the very patterns we seek to manage. Precision elevation—derived from airborne LiDAR (Light Detection and Ranging)—solves this by separating the ground from the vegetation and delivering both a bare‑earth Digital Terrain Model (DTM) and a Digital Surface Model (DSM). Subtracting DTM from DSM gives a Canopy Height Model (DHM) that captures the true vertical architecture of the forest at sub‑meter resolution.
The beauty (and precision) of LIDAR:

Lidar, which stands for Light Detection and Ranging, is a technology that uses laser beams to measure distances and create detailed maps of the surrounding environment. It works by emitting laser pulses and then measuring the time it takes for the pulses to bounce back after hitting objects in their path. By analyzing the returning signals, lidar can accurately calculate the distance to various points and generate a three-dimensional map.
Wildfires in the sub-Saharan region

This image, acquired by one of the Copernicus Sentinel-2 on 8 February 2022, shows ongoing wildfires in the Boma National Park in South Sudan. Fires are common at this time of year in the sub-Saharan region.
Peña Muñana en Cadalso de los Vidrios
Febrero 2022. Zona de Peña Muñana en Término Municipal de Cadalso de los Vidrios, en Madrid, España. Fly-through semi-automático realizado con el software GLOBAL MAPPER V23.0. Fuentes: TIF Raster grid de LIDAR 2m (PNOA) descargado desde el CNIG e imágenes de alta resolución World Imagery (desarrollado abajo).
Google Earth Engine y los incendios de verano: el caso de Cadalso de los Vidrios, Madrid (Julio 2019)

Gracias a la inestimable ayuda de mi compi de co-working Pablo Martín -ingeniero Forestal- con Google Earth Engine hemos modelado este NBR (Normalized Burn Ratio) que usa los canales NIR y SWIR de Sentinel-2 para medir la severidad del incendio de la semana pasada en mi pueblo, Cadalso de los Vidrios (Madrid, España). Rozamos la tragedia en lo personal pero sin duda fue terrible a nivel material. Tardaremos décadas en revertir este funesto incendio…
