Cuando alguien me pregunta sobre radar, pienso sobre todo en radares montados en satélites (sesgo geospacial) pero en realidad hay mucho más, hoy voy a hablaros de de radares aeroportados, de filtros de Kalman y seguimiento de blancos aéreos en movimiento… ¡Qué interesante!
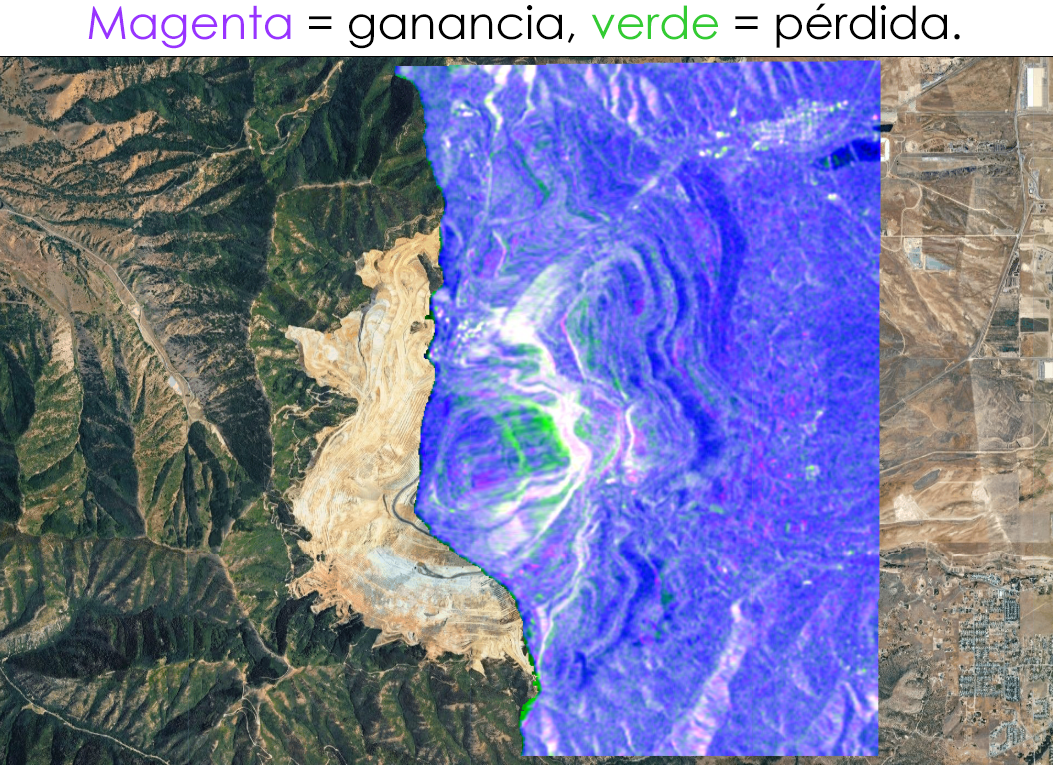
Lo primero que pienso no es en el radar en sí, sino en el problema que resuelve, porque ese problema lo llevo resolviendo de otra forma desde hace años sin llamarlo por su nombre técnico. Un radar mide la posición de un avión con ruido. Un GPS mide la posición de un coche con ruido. Un sensor SAR mide el desplazamiento del terreno con ruido. En los tres casos hay una señal real escondida detrás de mediciones que saltan, que tiemblan, que nunca coinciden exactamente con la trayectoria verdadera. Y en los tres casos la respuesta es la misma matemática: combinar lo que predice el modelo físico con lo que dice el sensor, ponderando cada fuente según cuánto te fías de ella.