Análisis de cambios con SAR (Radar de Apertura Sintética) usando Sentinel-1 sobre la mina Bingham Canyon en Utah, donde ocurrió uno de los mayores deslizamientos de tierra de la historia minera el 10 de abril de 2013. El análisis no es PRE/POST del evento en sentido estricto. Es una detección de cambios entre dos períodos posteriores al deslizamiento:
- *PRE en el script = oct 2014 – jun 2015 (primera referencia disponible)
- POST en el script = jul 2015 – mar 2016 (un año después)
Lo que se detecta no es “antes vs después del colapso de 2013”, sino la evolución de la cicatriz entre 2015 y 2016: reconfiguración de taludes, movimiento de material, estabilización o actividad residual de la zona afectada.
Las cicatrices geomorfológicas de un deslizamiento de esa magnitud no desaparecen en meses. La rugosidad anómala, los depósitos de escombros y la geometría alterada del pit siguen siendo detectables por el radar años después. Lo que el análisis captura es la dinámica post-colapso, no el colapso en sí. el radar detecta los cambios superficiales ocurridos entre 2015 y 2016 sobre la zona afectada por el deslizamiento de 2013. Es un matiz importante que señalo de entrada para no generar confusión.

La clave, el backscatter, pero ¿qué es?. El satélite emite un pulso de microondas hacia la Tierra, ese pulso golpea la superficie y se dispersa en todas direcciones. El backscatter es la fracción que regresa exactamente hacia el sensor. Se mide en decibelios (dB), donde valores más negativos = menos energía devuelta.
Qué determina cuando vuelve?. Tres factores principales: 1 Humedad/dieléctrico: suelo húmedo o vegetación densa absorben y devuelven más energía 2 Rugosidad superficial: una roca fragmentada devuelve muchísimo más que una superficie lisa 3 Geometría: esquinas y estructuras verticales crean “corner reflectors” que disparan el backscatter
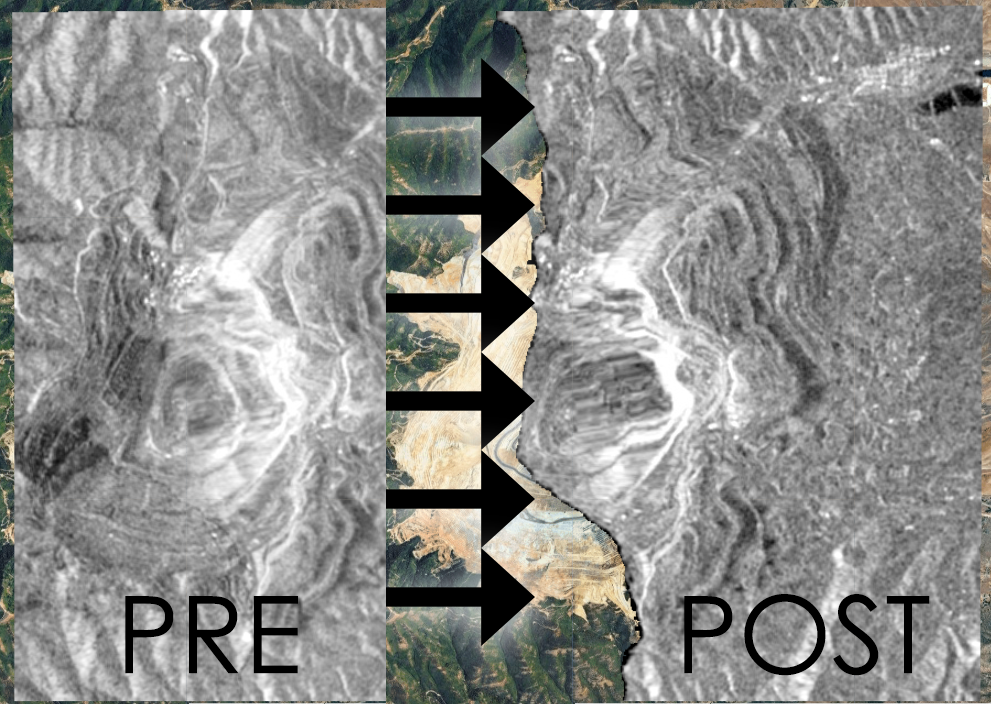
Antes del colapso*: la mina tiene taludes estables, geometría conocida, señal SAR consistente.
Después: millones de toneladas de roca fragmentada y removida cambian radicalmente la rugosidad y geometría de la superficie. El radar lo ve como un cambio brusco de backscatter, aunque haya nubes, aunque sea de noche.
Ahí está la clave: el radar no necesita luz solar ni cielo despejado. Ve a través de todo.
Valor Cercano a 0 dB Casi toda la energía vuelve (metal, agua agitada, roca desnuda)
Valor −10 a −15 dBVegetación, suelo moderado
Valor < −20 dBAgua calma, superficies muy lisas (casi nada vuelve)
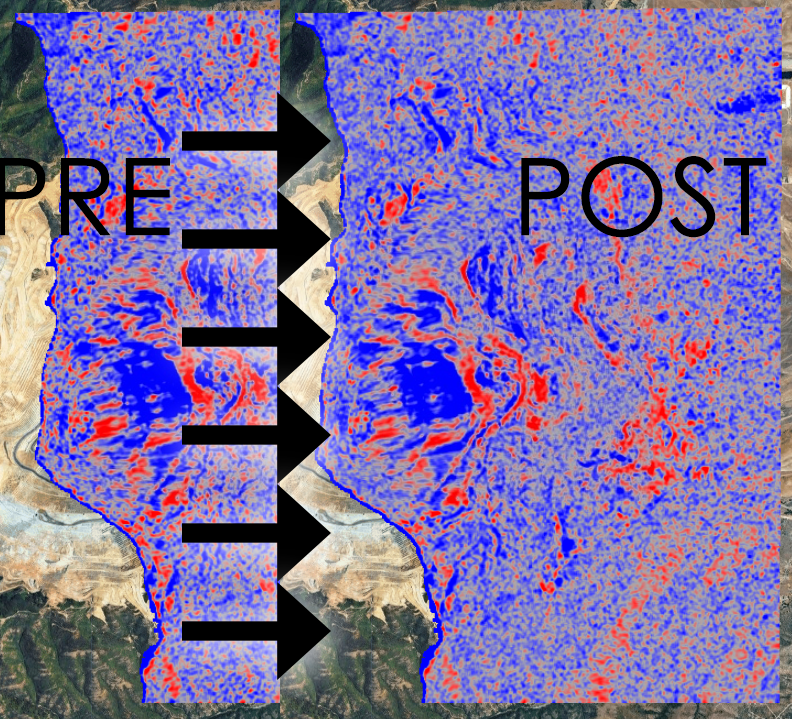
En este análisis, un Δ de +3 dB o más indica que esa zona devuelve el doble de energía que antes, señal inequívoca de que algo cambió físicamente en la superficie.
Como S1 no se lanzó hasta 2014, el script usa las primeras imágenes disponibles como referencia base en lugar de tener un “antes” real del evento. El flujo tiene tres grandes bloques:
Preparación de datos
Filtra la colección COPERNICUS/S1_GRD en modo Interferometric Wide (IW), manteniendo solo imágenes con ambas polarizaciones VV y VH. Define dos ventanas temporales: PRE (oct 2014 – jun 2015) y POST (jul 2015 – mar 2016). De cada ventana extrae una mediana, que por sí sola ya reduce bastante el speckle. Encima aplica un filtro boxcar 3×3 adicional por banda.
Detección de cambios
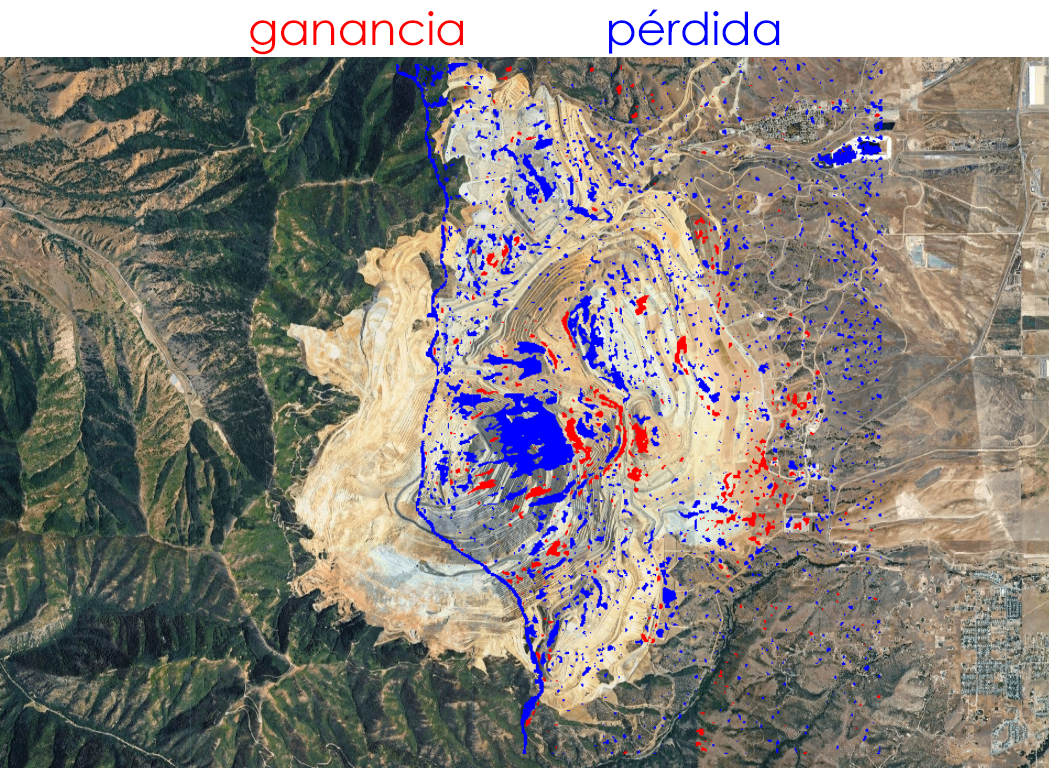
Calcula la diferencia POST − PRE en decibelios para VV, VH y su media. Un Δ positivo indica aumento de backscatter (material acumulado, mayor rugosidad superficial), un Δ negativo indica pérdida o remoción. Aplica un umbral de ±3 dB para distinguir cambio significativo del ruido de fondo.
Salidas y análisis
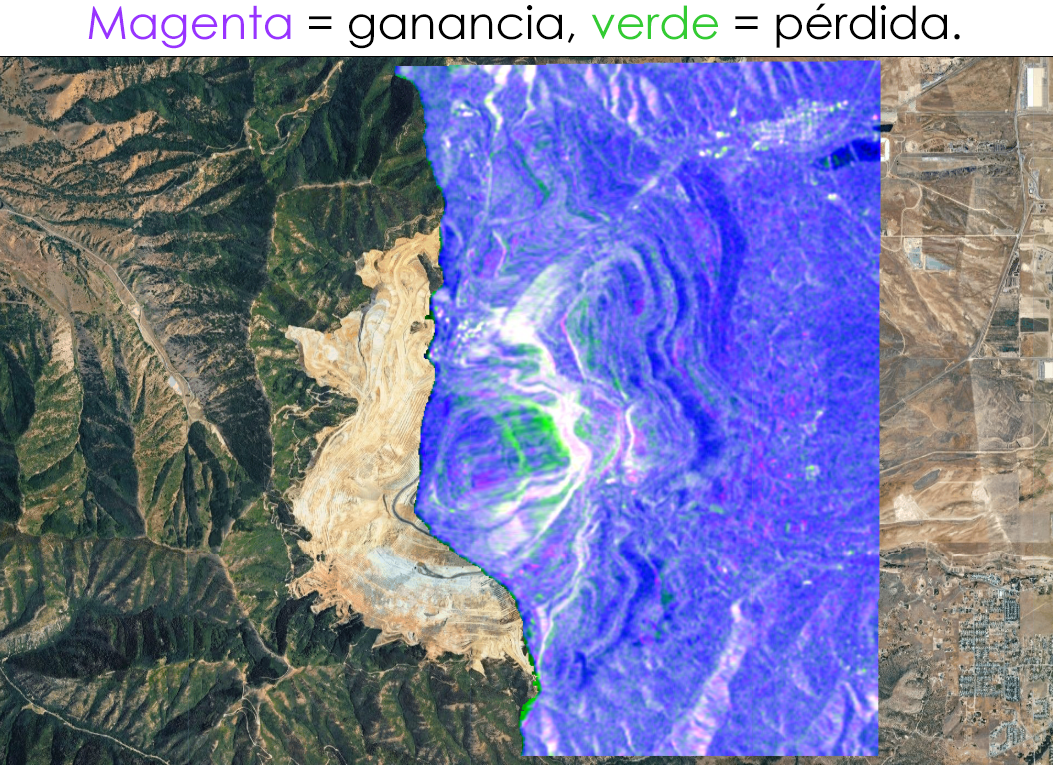
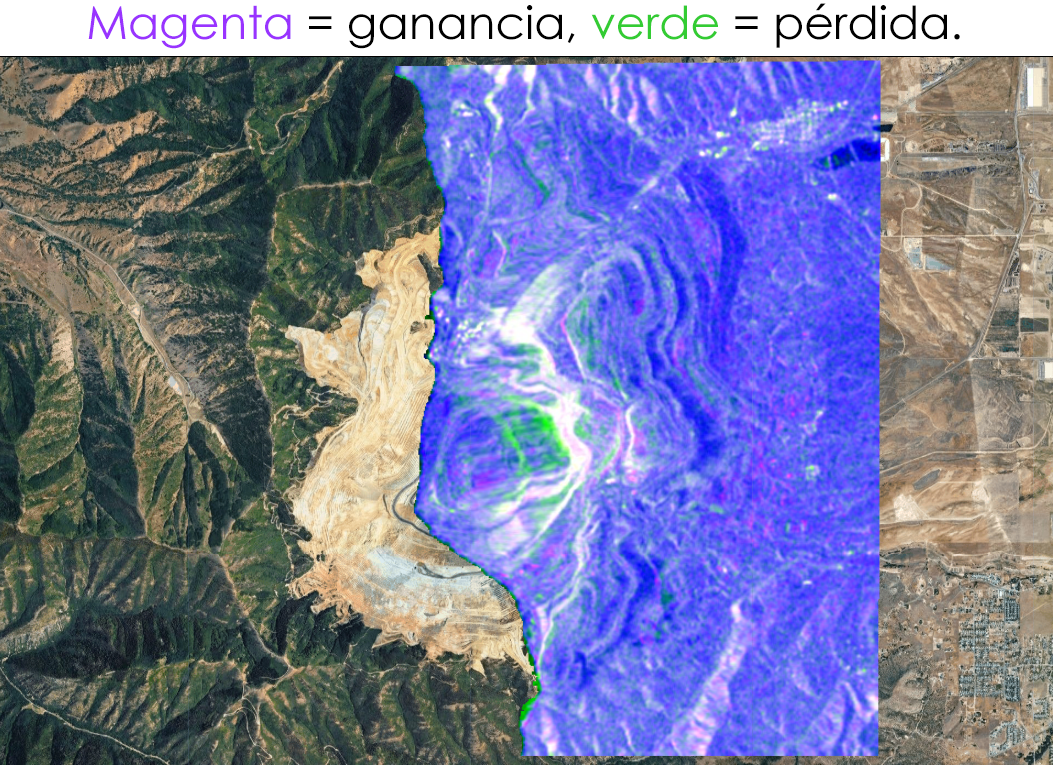
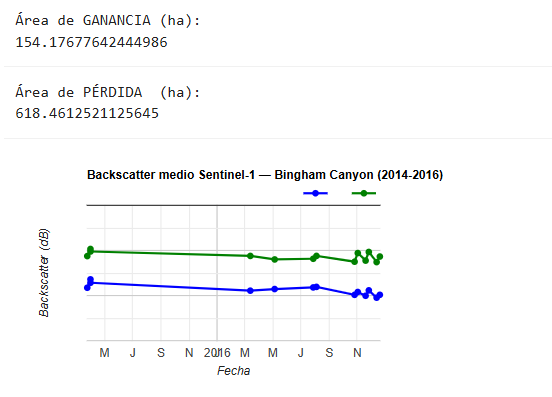
Visualiza cuatro capas SAR (PRE/POST × VV/VH), los tres mapas de diferencia y un RGB multitemporal donde el canal R lleva POST-VV, G lleva PRE-VV y B lleva la diferencia, produciendo tonos magenta donde hay ganancia y verdes donde hay pérdida. Calcula el área afectada en hectáreas con pixelArea y genera una serie temporal de backscatter medio en el AOI entre 2014 y 2016. Finalmente exporta a Drive los rásteres de diferencia VV, VH y la máscara de cambio binarizada.
Un detalle metodológico relevante: el script no fuerza una órbita concreta (ascending o descending) porque la mediana temporal compensa la mezcla de geometrías de adquisición, aunque para un análisis más riguroso lo ideal sería separar órbitas.
Conclusión
El deslizamiento de Bingham Canyon ocurrió en abril de 2013. Sentinel-1 no existía todavía. Y aun así, el radar fue capaz de leer las cicatrices que dejó en el terreno más de un año después.
Eso dice algo importante sobre la naturaleza del SAR: no necesita estar en el momento exacto para detectar que algo cambió. La geometría del terreno, la rugosidad de la roca fragmentada, la reconfiguración de los taludes… todo queda impreso en el backscatter durante meses, incluso años.
Lo que este script demuestra no es solo que GEE puede procesar imágenes SAR en la nube sin descargar un solo píxel. Demuestra que con datos abiertos, código reproducible y una ventana temporal bien elegida, es posible reconstruir la huella espacial de un evento catastrófico desde cero.
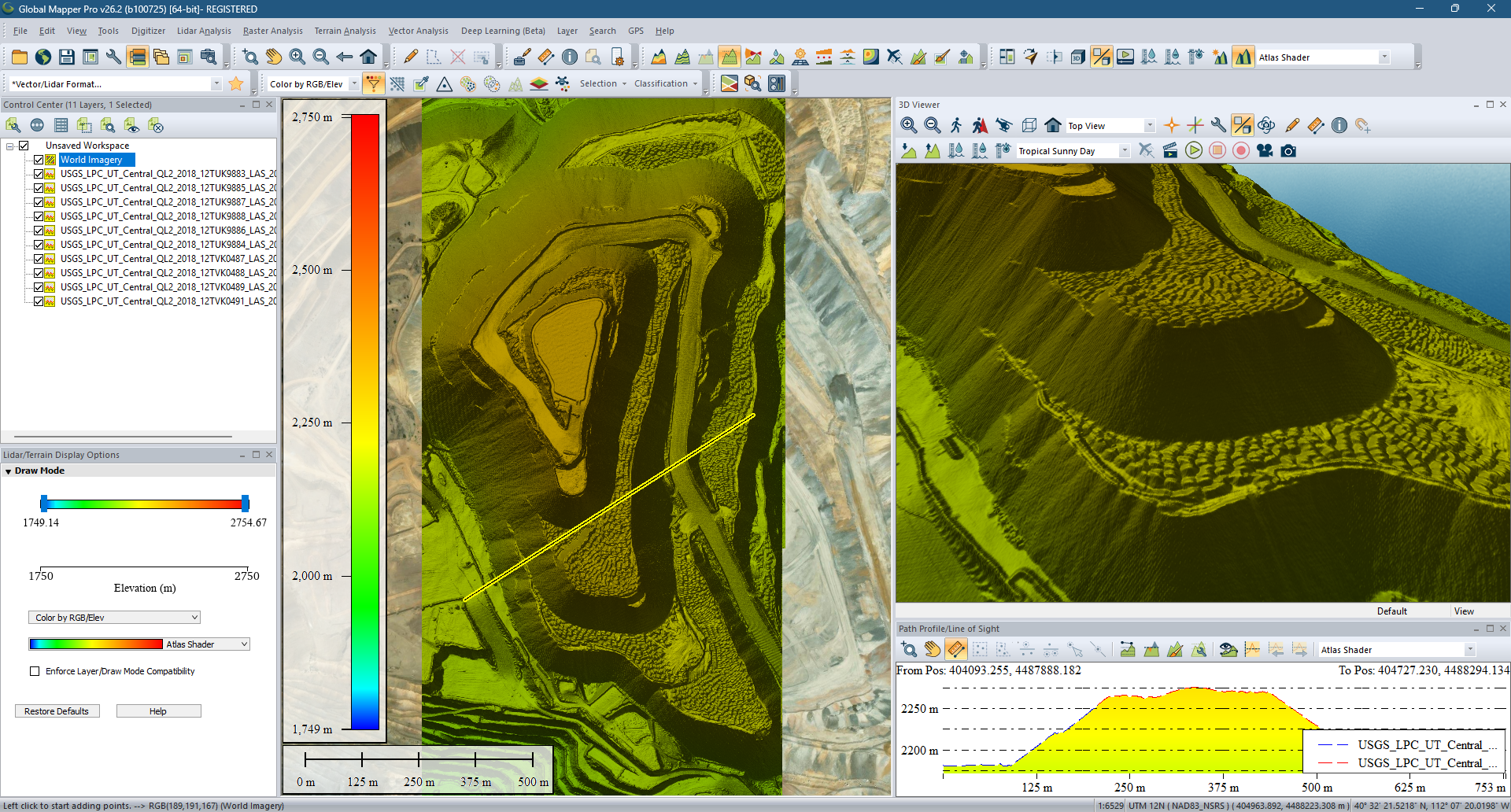
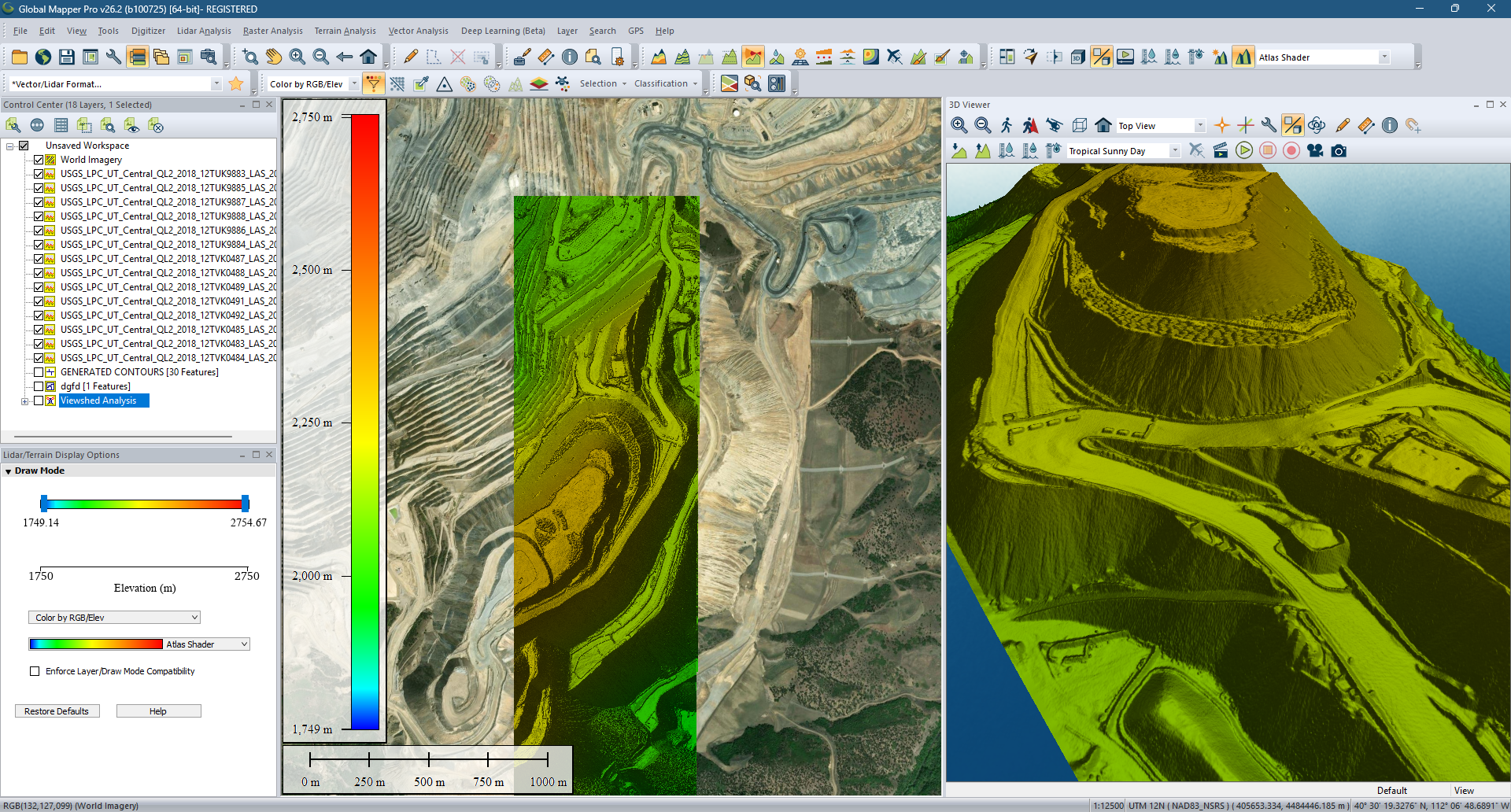
El siguiente paso natural es la tercera dimensión. El radar nos dice dónde cambió la superficie. El LiDAR USGS 3DEP (Imagen 4) nos dice cuánto volumen se desplazó. La combinación de ambas fuentes: SAR multitemporal + MDT de alta resolución, es exactamente el tipo de análisis que los equipos de gestión de riesgos geológicos necesitan, y que hoy es accesible sin infraestructura dedicada, solo conociendo las fuentes.
Espero que te haya gustado!
Alberto Concejal
GIS Analyst
https://storymaps.arcgis.com/stories/a5398ca1f6ea4b05b90272e38281c903
https://apps.nationalmap.gov/lidar-explorer
